موتور القایی آسنکرون یکی از پرکاربردترین انواع موتورهای الکتریکی در صنعت و خانههای مدرن است. این نوع موتور به دلیل کارایی بالا، قدرت گرفتن از تغذیه برق شهری و ساختار ساده خود، در بسیاری از کاربردها مورد استفاده قرار میگیرد. در این مقاله، به بررسی اصول کار موتور القایی آسنکرون و کاربردهای آن میپردازیم.

موتور القایی آسنکرون یکی از مهمترین نوعهای موتورهای الکتریکی است که تاریخچهی طولانی و جالبی دارد. این موتورها از اواخر قرن نوزده تا اوایل قرن بیست مورد توسعه و استفاده قرار گرفتهاند. در زیر، تاریخچهی موتور القایی آسنکرون را به صورت خلاصه بیان میکنیم:
موتورهای القایی آسنکرون با تاریخچهی طولانی و توسعهی مدرنتر در دنیای الکتریسیته و الکترونیک به یکی از ابزارهای بسیار مهم در صنعت و فناوری تبدیل شدهاند و به بهبود عملکرد و کارایی در انواع کاربردها کمک میکنند.
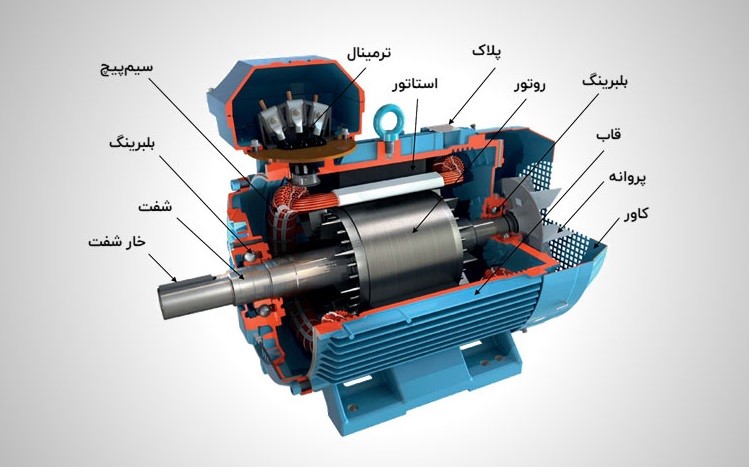
موتور القایی آسنکرون یک نوع موتور الکتریکی است که بر اساس اصول الکترومغناطیسی کار میکند. این موتور از دو بخش اصلی تشکیل شده است: استاتور و روتور.
موتورهای آسنکرون به عنوان یکی از نوعهای موتورهای الکتریکی، در انواع مختلف صنعتی و تجاری به کار میروند. در زیر به برخی از کاربردهای مهم این موتورها اشاره شده است:
در کل، موتورهای آسنکرون به عنوان یکی از اجزای مهم و گسترده در تکنولوژی و صنعت مدرن بسیار مورد استفاده قرار میگیرند و انعطافپذیری آنها در انواع مختلف کاربردها از آنها یک انتخاب محبوب میکند.