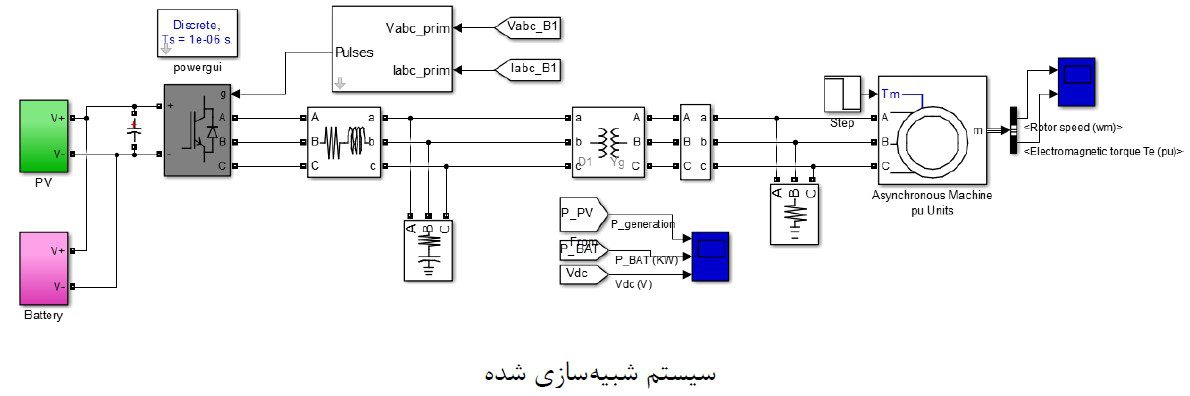
موتور دالاندر (به انگلیسی: “Dahlander Motor”) یک نوع موتور الکتریکی سه فاز با سرعت چندگانه است که در انواع صنایع و برنامههای مختلف مورد استفاده قرار میگیرد. این موتور به دلیل توانایی تغییر سرعت به صورت پیوسته و کاربردهای متعدد خود، یکی از مهمترین انواع موتورهای الکتریکی است. در این مقاله، به بررسی عملکرد، کاربردها و مزایای موتور دالاندر خواهیم پرداخت.

موتور دالاندر، یکی از تجهیزات مهم در صنعت معدن و ساختمان است که برای حرکت مواد سنگین و جمعآوری آنها به کار میرود. تاریخچه استفاده از موتور دالاندر به ما راهی را نشان میدهد که چگونه این تجهیزات از زمان ابتدایی تا به امروز تکامل یافتهاند. در ادامه، به مروری بر تاریخچه استفاده از موتور دالاندر میپردازیم:
شروع استفاده از دالاندرها:
توسعه در دوران صنعتی:
موتورهای الکتریکی در دالاندرها:
پیشرفتهای اخیر:
استفاده در صنایع مختلف:
موتور دالاندر با توانایی تنظیم سرعت پیوسته و کاربردهای متعدد، یکی از مهمترین انواع موتورهای الکتریکی در صنایع مختلف است. از آنجا که این موتورها به بهرهوری انرژی کمک میکنند و قابلیت تطبیق با شرایط مختلف را دارند، در انواع مختلف برنامهها و صنایع به کار میروند و به بهرهبرداران امکان مدیریت بهتری از تجهیزات و سیستمهای خود را میدهند.