پرش به محتوا
خرید اینورتر
تعمیرات اینورتر
برندهای اینورتر
وبلاگ
خدمات ما
درباره ما
تماس باما
نمایندگی ها
فهرست
خرید اینورتر
تعمیرات اینورتر
برندهای اینورتر
وبلاگ
خدمات ما
درباره ما
تماس باما
نمایندگی ها
الکتریکالـا
جستجو کردن
جستجو کردن
0
ریال
0
سبد خرید
الکتریکالـا
جستجو کردن
جستجو کردن
02177624653
0
ریال
0
سبد خرید
خرید اینورتر
تعمیرات اینورتر
برندهای اینورتر
وبلاگ
خدمات ما
درباره ما
تماس باما
نمایندگی ها
فهرست
خرید اینورتر
تعمیرات اینورتر
برندهای اینورتر
وبلاگ
خدمات ما
درباره ما
تماس باما
نمایندگی ها
weblog
جستجو کردن
جستجو کردن
تعمیر اینورتر کنترل تکنیک
control-techniques در سال ۱۹۷۲ با عنوان KTK در نیوتون، ولز تاسیس شد.شرکت کنترل تکنیک بیش از چهل سال سابقه در...
3 سال پیش
پروگرمر چیست؟
پروگرمر چیست؟ در میکروکنترلرها یک دستگاه یا نرمافزار است که برای برنامهنویسی میکروکنترلرها استفاده میشود. این دستگاه یا نرمافزار به...
3 سال پیش
تعمیر اینورتر یوروترم
جهت تعمیر اینورتر یوروترم به بررسی فالتهای مهم این درایو میپردازیم و همچنین نمونههای اینورترهای تعمیر شده در الکتریکالا را...
3 سال پیش
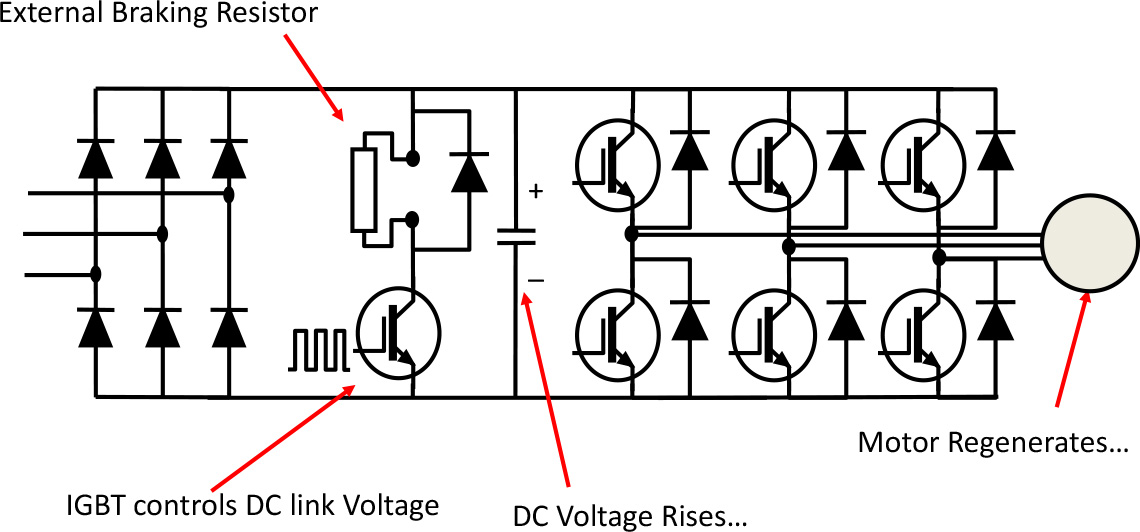
نصب یونیت بازخور Regenerative unit
نصب یونیت بازخور Regenerative unit :در دنیای پیشرفتهی امروز، مصرف انرژی به یکی از مهمترین چالشهای جامعه تبدیل شده است....
3 سال پیش
تریستور چیست؟
تریستور چیست؟ تریستور قطعهای نیمه رسانا است و مورد استفاده در مدارهای الکترونیک قدرت و الکترونیک صنعتی میباشد. تریستور، یکسوساز...
3 سال پیش
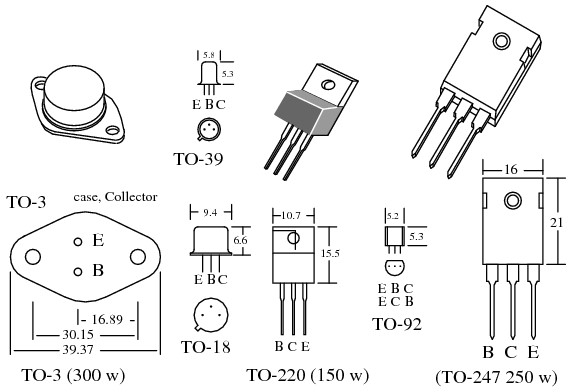
ترانزيستور چيست؟
ترانزيستور چيست؟ ترانزیستور یکی از مهمترین اختراعات در تاریخ علم و فناوری است که از اوایل دهه ۱۹۵۰ میلادی وارد...
3 سال پیش
وارونگر IGBT
IGBT یک اختصار از عبارت "Insulated Gate Bipolar Transistor" است که به فارسی به عنوان "ترانزیستور دوقطبی با دروازه ایزوله"...
3 سال پیش
هارمونیک
هارمونیکها، اصطلاحی در علوم برق و موسیقی است و به فرمانهای فرکانسی ناخواسته و غیر مطلوب در یک سیستم یا...
3 سال پیش
نویز در اینورتر
نویز چیست؟ به طور کلی نویز به هر نوسان و تغییر غیرعادی که بر روی سیگنالها ظاهر میشود، اطلاق میگردد....
3 سال پیش
تعمیر اینورتر کینکو
جهت تعمیر اینورتر کینکو به بررسی فالتهای مهم این درایو میپردازیم و همچنین نمونههای اینورترهای تعمیر شده در الکتریکالا را...
3 سال پیش
1
2
ورود به سیستم
×
شماره موبایل
کد تایید
چیزی خاص را وارد کنید:
مرا به خاطر بسپار
ورود با کد یکبارمصرف
ارسال مجدد کد یکبار مصرف
(00:
30
)
آیا حساب کاربری ندارید؟
ثبت نام
نام
ایمیل / شماره موبایل
ایمیل / شماره موبایل
(دلخواه)
رمزعبور
شماره موبایل
کد تایید
*
کد تایید
ثبت نام با ارسال پیامک به شماره موبایل
ارسال مجدد کد یکبار مصرف
(00:
30
)
ثبت نام با رمزعبور
برگشت به صفحه ورود به سایت
(+93) Afghanistan
(+355) Albania
(+213) Algeria
(+1) American Samoa
(+376) Andorra
(+244) Angola
(+1) Anguilla
(+1) Antigua
(+54) Argentina
(+374) Armenia
(+297) Aruba
(+61) Australia
(+43) Austria
(+994) Azerbaijan
(+973) Bahrain
(+880) Bangladesh
(+1) Barbados
(+375) Belarus
(+32) Belgium
(+501) Belize
(+229) Benin
(+1) Bermuda
(+975) Bhutan
(+591) Bolivia
(+599) Bonaire, Sint Eustatius and Saba
(+387) Bosnia and Herzegovina
(+267) Botswana
(+55) Brazil
(+246) British Indian Ocean Territory
(+1) British Virgin Islands
(+673) Brunei
(+359) Bulgaria
(+226) Burkina Faso
(+257) Burundi
(+855) Cambodia
(+237) Cameroon
(+1) Canada
(+238) Cape Verde
(+1) Cayman Islands
(+236) Central African Republic
(+235) Chad
(+56) Chile
(+86) China
(+57) Colombia
(+269) Comoros
(+682) Cook Islands
(+225) Côte d'Ivoire
(+506) Costa Rica
(+385) Croatia
(+53) Cuba
(+599) Curaçao
(+357) Cyprus
(+420) Czech Republic
(+243) Democratic Republic of the Congo
(+45) Denmark
(+253) Djibouti
(+1) Dominica
(+1) Dominican Republic
(+593) Ecuador
(+20) Egypt
(+503) El Salvador
(+240) Equatorial Guinea
(+291) Eritrea
(+372) Estonia
(+251) Ethiopia
(+500) Falkland Islands
(+298) Faroe Islands
(+691) Federated States of Micronesia
(+679) Fiji
(+358) Finland
(+33) France
(+594) French Guiana
(+689) French Polynesia
(+241) Gabon
(+995) Georgia
(+49) Germany
(+233) Ghana
(+350) Gibraltar
(+30) Greece
(+299) Greenland
(+1) Grenada
(+590) Guadeloupe
(+1) Guam
(+502) Guatemala
(+44) Guernsey
(+224) Guinea
(+245) Guinea-Bissau
(+592) Guyana
(+509) Haiti
(+504) Honduras
(+852) Hong Kong
(+36) Hungary
(+354) Iceland
(+91) India
(+62) Indonesia
(+98) Iran
(+964) Iraq
(+353) Ireland
(+44) Isle Of Man
(+972) Israel
(+39) Italy
(+1) Jamaica
(+81) Japan
(+44) Jersey
(+962) Jordan
(+7) Kazakhstan
(+254) Kenya
(+686) Kiribati
(+965) Kuwait
(+996) Kyrgyzstan
(+856) Laos
(+371) Latvia
(+961) Lebanon
(+266) Lesotho
(+231) Liberia
(+218) Libya
(+423) Liechtenstein
(+370) Lithuania
(+352) Luxembourg
(+853) Macau
(+389) Macedonia
(+261) Madagascar
(+265) Malawi
(+60) Malaysia
(+960) Maldives
(+223) Mali
(+356) Malta
(+692) Marshall Islands
(+596) Martinique
(+222) Mauritania
(+230) Mauritius
(+262) Mayotte
(+52) Mexico
(+373) Moldova
(+377) Monaco
(+976) Mongolia
(+382) Montenegro
(+1) Montserrat
(+212) Morocco
(+258) Mozambique
(+95) Myanmar
(+264) Namibia
(+674) Nauru
(+977) Nepal
(+31) Netherlands
(+687) New Caledonia
(+64) New Zealand
(+505) Nicaragua
(+227) Niger
(+234) Nigeria
(+683) Niue
(+672) Norfolk Island
(+850) North Korea
(+1) Northern Mariana Islands
(+47) Norway
(+968) Oman
(+92) Pakistan
(+680) Palau
(+970) Palestine
(+507) Panama
(+675) Papua New Guinea
(+595) Paraguay
(+51) Peru
(+63) Philippines
(+48) Poland
(+351) Portugal
(+1) Puerto Rico
(+974) Qatar
(+242) Republic of the Congo
(+40) Romania
(+262) Runion
(+7) Russia
(+250) Rwanda
(+290) Saint Helena
(+1) Saint Kitts and Nevis
(+508) Saint Pierre and Miquelon
(+1) Saint Vincent and the Grenadines
(+685) Samoa
(+378) San Marino
(+239) Sao Tome and Principe
(+966) Saudi Arabia
(+221) Senegal
(+381) Serbia
(+248) Seychelles
(+232) Sierra Leone
(+65) Singapore
(+1) Sint Maarten
(+421) Slovakia
(+386) Slovenia
(+677) Solomon Islands
(+252) Somalia
(+27) South Africa
(+82) South Korea
(+211) South Sudan
(+34) Spain
(+94) Sri Lanka
(+1) St. Lucia
(+249) Sudan
(+597) Suriname
(+268) Swaziland
(+46) Sweden
(+41) Switzerland
(+963) Syria
(+886) Taiwan
(+992) Tajikistan
(+255) Tanzania
(+66) Thailand
(+1) The Bahamas
(+220) The Gambia
(+670) Timor-Leste
(+228) Togo
(+690) Tokelau
(+676) Tonga
(+1) Trinidad and Tobago
(+216) Tunisia
(+90) Turkey
(+993) Turkmenistan
(+1) Turks and Caicos Islands
(+688) Tuvalu
(+1) U.S. Virgin Islands
(+256) Uganda
(+380) Ukraine
(+971) United Arab Emirates
(+44) United Kingdom
(+1) United States
(+598) Uruguay
(+998) Uzbekistan
(+678) Vanuatu
(+58) Venezuela
(+84) Vietnam
(+681) Wallis and Futuna
(+212) Western Sahara
(+967) Yemen
(+260) Zambia
(+263) Zimbabwe