موتورهای آسنکرون (همچنین به نام موتورهای القائی یا موتورهای جریان متناوب) به عنوان یکی از پرکاربردترین انواع موتورهای الکتریکی در صنعت و خانههای ما استفاده میشوند. این موتورها به دلیل ساختار ساده، کارایی بالا و نیاز به نگهداری کم، در اکثر زمینههای صنعتی و خانگی مورد استفاده قرار میگیرند. انواع روشهای راهاندازی موتور آسنکرون یکی از مسائل مهم در عملکرد صحیح آنهاست.
در این مقاله، به معرفی و بررسی انواع روشهای راهاندازی موتور آسنکرون پرداخته خواهد شد.
موتور آسنکرون
موتور آسنکرون (همچنین به نام موتور القائی یا موتور جریان متناوب) یکی از پرکاربردترین نوع موتورهای الکتریکی در جهان است. این موتورها برای تبدیل انرژی برقی به انرژی مکانیکی برای چرخش و حرکت اشیاء مورد استفاده قرار میگیرند. موتورهای آسنکرون در صنایع مختلف، از جمله صنعت خودروسازی، صنعت نفت و گاز، پمپها، فنها، و دستگاههای خانگی به کار میروند.
ویژگیها و عملکرد موتور آسنکرون به شرح زیر است:
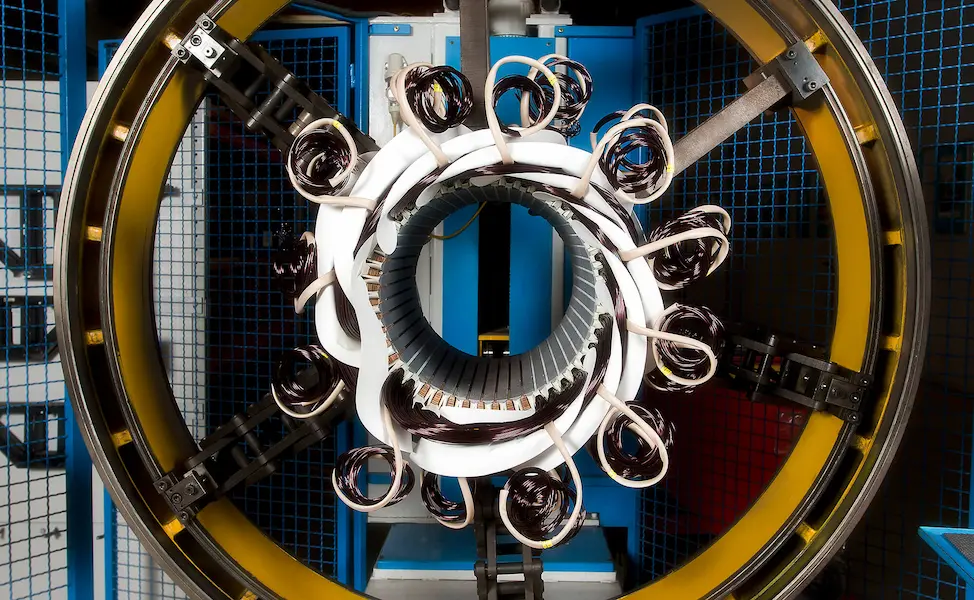
- ساختار ساده: موتور آسنکرون دارای ساختار سادهای است که از دو بخش اصلی تشکیل شده است: استاتور (قسمت ثابت) و روتور (قسمت متحرک). این ساختار ساده باعث میشود موتور آسنکرون قابلیت تولید بزرگترین تعداد موتورها در مقایسه با دیگر انواع موتورها را داشته باشد.
- عملکرد بر اساس جریان متناوب: موتور آسنکرون با ورودی جریان متناوب (AC) کار میکند. جریان AC به ستاتور تغذیه میشود و میدان مغناطیسی دو قطبی در آن ایجاد میشود.
- روشهای راهاندازی متنوع: موتور آسنکرون با استفاده از روشهای مختلفی مانند راهاندازی مستقیم، استارت-دلتا، و اینورتر میتواند راهاندازی شود. این انعطافپذیری در راهاندازی، موتورها را برای کاربردهای مختلف مناسب میکند.
- بدون اسکول: موتور آسنکرون بدون استفاده از اسکول (سیستم مخصوصی برای انتقال جریان الکتریکی به روتور) کار میکند. این ویژگی باعث افزایش دوام و کاهش نیاز به نگهداری موتور میشود.
- کارایی قابل قبول: موتورهای آسنکرون کارایی متوسطی دارند و بستگی به اندازه و نوع بار دارند. با استفاده از روشهای کنترلی مانند اینورترها، کارایی آنها را میتوان بهبود داد.
- مصرف انرژی کم: این موتورها در زمان خاموشی بدون مصرف انرژی هستند و در صنایعی که نیاز به پایداری برق دارند، مورد استفاده قرار میگیرند.
- کاربردهای گسترده: موتورهای آسنکرون در صنایع مختلفی مانند تولید برق، حمل و نقل، تهویه مطبوع، و صنایع تولیدی به کار می روند.
با توجه به ویژگیهای مذکور، موتورهای آسنکرون به عنوان یکی از انتخابهای اصلی در صنعت الکترومکانیک و اتوماسیون صنعتی شناخته میشوند.

در ادامه این مقاله به بررسی انواع روشهای راهاندازی موتور آسنکرون می پردازیم.
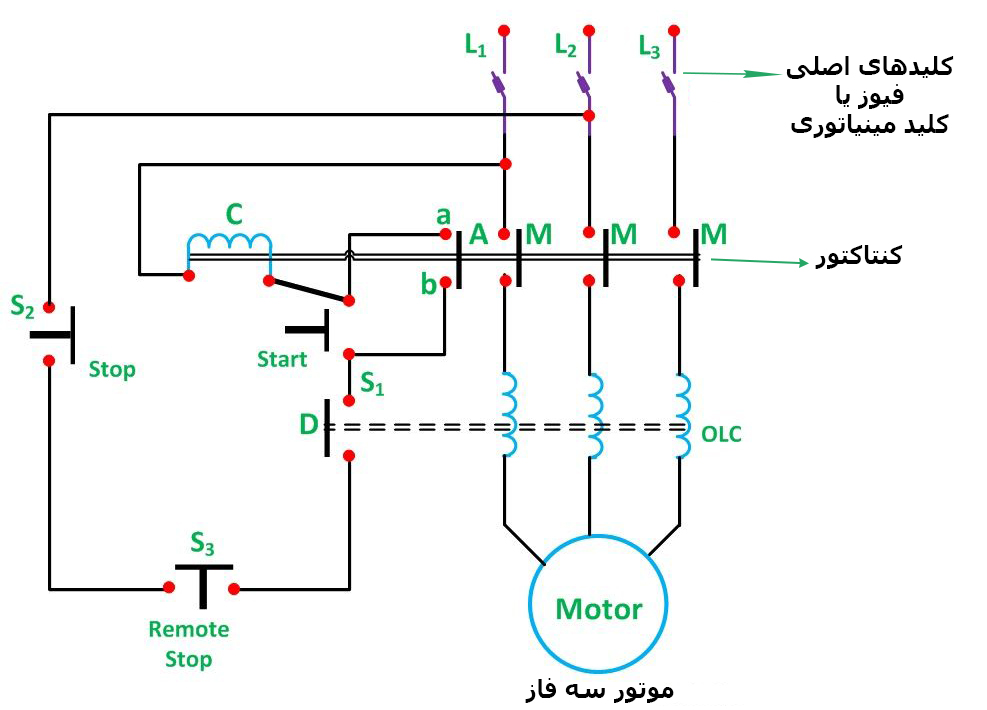
روش راهاندازی مستقیم (Direct On Line – DOL)
- روش DOL یکی از سادهترین و رایجترین روشهای راهاندازی موتورهای آسنکرون است. در این روش، موتور به صورت مستقیم به منبع تغذیه برقی متصل میشود. این روش مناسب برای موتورهای کوچک تا متوسط با بار ثابت است.
روش استارت-دلتا (Star-Delta Starter)
- این روش به منظور کاهش جریان راهاندازی اولیه و حفاظت از موتور در موتورهای با توان بالا مورد استفاده قرار میگیرد. در ابتدا، موتور به حالت ستارهای (Star) راهاندازی میشود و پس از چند ثانیه به حالت دلتا (Delta) منتقل میشود.
روش انتزاعی (Autotransformer Starter)
- این روش از یک ترانسفورماتور انتزاعی برای کنترل ولتاژ و جریان موتور استفاده میکند. این روش به کاهش جریان راهاندازی و افزایش نرمی در راهاندازی موتورهای با بار سنگین کمک میکند.
روش رزیستور استارتر (Resistance Starter)
این روش از رزیستورها برای کاهش ولتاژ اولیه و جریان راهاندازی موتور استفاده میکند. این روش مناسب برای موتورهای با بارهای سنگین ویاژه درخواست کننده راهاندازی نرم است.
روش اینورتر (Inverter Starter)
- این روش از یک اینورتر برای تغییر فرکانس و ولتاژ ورودی به موتور استفاده میکند. این روش برای کنترل دقیق سرعت موتور و افزایش کارایی در برنامههایی که نیاز به تغییر سرعت متناوب دارند، مناسب است.