مدهای کنترلی در اینورترها یکی از موارد حیاتی در عملکرد و کارایی این دستگاههای الکترونیکی مهم است. اینورترها، دستگاههایی هستند که ولتاژ مستقیم را به ولتاژ متناوب تبدیل میکنند و در بسیاری از کاربردها مانند موتورهای الکتریکی، سیستمهای تغذیه برق، و تجهیزات الکترونیکی استفاده میشوند.
انواع مختلفی از مدهای کنترلی برای کنترل و عملکرد بهینه اینورترها وجود دارد که در ادامه به توضیح آنها میپردازیم.

1. مد کنترل V/F (Voltage to Frequency)
مد کنترل V/F (Voltage to Frequency) یکی از مدهای کنترلی در اینورترها است که برای کنترل سرعت موتورهای القایی استفاده میشود. در این مد، ولتاژ و فرکانس خروجی جریان متناوب به نسبت یکدیگر تنظیم میشوند.
در مد V/F، با تغییر فرکانس خروجی، ولتاژ نیز متناسب با آن تغییر میکند. با افزایش فرکانس، ولتاژ نیز افزایش مییابد و با کاهش فرکانس، ولتاژ نیز کاهش مییابد. این رابطه ثابت V/F برای کنترل سرعت موتور استفاده میشود.
مد V/F به صورت ساده و قابل اجرا است و در بسیاری از کاربردهای صنعتی مورد استفاده قرار میگیرد. از جمله کاربردهای این مد کنترلی میتوان به کنترل سرعت موتورهای AC در ماشینآلات صنعتی، پمپها، فنها و کمپرسورها اشاره کرد.
با تنظیم فرکانس خروجی در مد V/F، سرعت موتور کنترل میشود. با افزایش فرکانس، سرعت موتور نیز افزایش مییابد و با کاهش فرکانس، سرعت موتور نیز کاهش مییابد. این مد کنترلی مناسب برای کاربردهایی است که نیاز به کنترل ساده و قابلیت تنظیم سرعت در محدوده خاصی دارند.
2. مد کنترل بسته PI (Proportional-Integral)
مد کنترل بسته PI (Proportional-Integral) یکی دیگر از مدهای کنترلی در اینورترها است که برای کنترل سرعت موتورهای القایی استفاده میشود. در این مد کنترلی، از الگوریتم کنترل PID (Proportional-Integral-Derivative) برای کنترل سرعت موتور استفاده میشود.
در مد PI، اشاره خطا بین سرعت مطلوب و سرعت فعلی موتور محاسبه میشود. سپس این خطا با استفاده از تابعهای نسبتی و انتگرالی متناسب با پارامترهای تنظیم شده، تنظیمات کنترلی را به موتور ارسال میکند.
بخش پروپورشنال (Proportional) مسئول تنظیم سرعت به اندازه خطا بین سرعت مطلوب و سرعت فعلی موتور است. بخش اینتگرال (Integral) مسئول کمک به رفع خطای ثابت و دقت در کنترل سرعت موتور است.
با استفاده از مد PI، امکان کنترل دقیقتر و پایدارتر سرعت موتور در محدوده خاصی فراهم میشود. این مد کنترلی برای کاربردهایی که نیاز به دقت بالا در کنترل سرعت دارند، مناسب است.
مد PI به طور گسترده در صنایع مختلفی مانند رباتیک، خطوط تولید، ماشینآلات CNC و سیستمهای اتوماسیون صنعتی استفاده میشود. از ویژگیهای مهم مد PI میتوان به دقت بالا، پاسخگویی سریع به تغییرات و استحکام در کنترل سرعت اشاره کرد.
3. مد کنترل برداری (Vector Control)
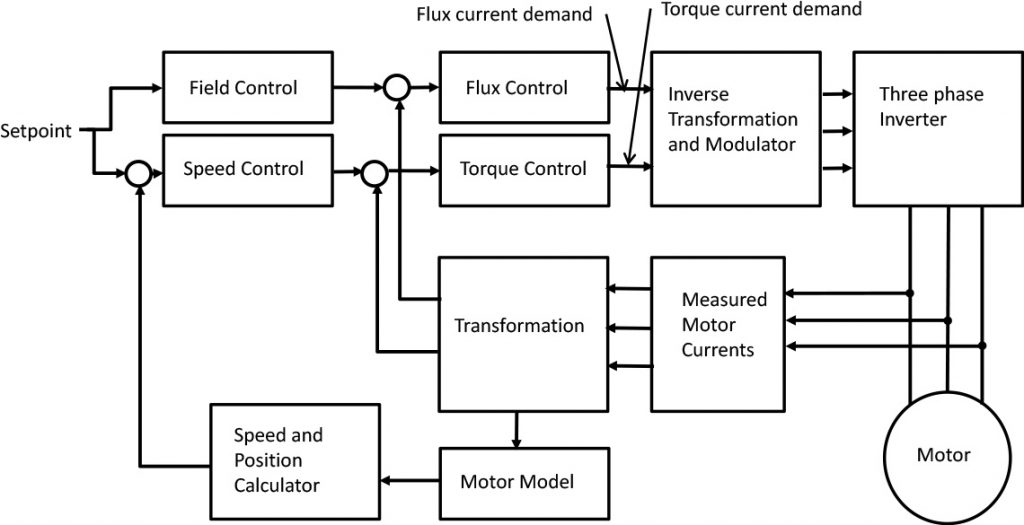
مد کنترل برداری (Vector Control) یکی از مدهای پیشرفته کنترل در اینورترها است که برای کنترل دقیق و سریع سرعت و گشتاور موتورهای القایی استفاده میشود. این مد کنترلی با استفاده از الگوریتمهای پیچیده، مدلسازی دقیق موتور و کنترل برداری، توانایی کنترل دقیق سرعت، گشتاور و جریان موتور را فراهم میکند.
در مد کنترل برداری، ولتاژ و جریان موتور به صورت برداری (Vector) مدلسازی میشوند. با استفاده از مدلسازی دقیق موتور و تکنیکهای مربوطه، بردار جریان و بردار ولتاژ به طور مستقیم کنترل میشوند. این مدل کنترل بر اساس مفهوم فضای برداری و مبانی نظری بردارهای فضایی (Space Vectors) استوار است.
مد کنترل برداری به صورت دقیق و سریع سرعت و گشتاور موتور را کنترل میکند و قابلیت دستیابی به تغییرات سریع سرعت، حفظ گشتاور مطلوب در شرایط متفاوت و جریان کمتر در آغاز را فراهم میسازد. همچنین، با استفاده از این مد کنترلی، امکان کاهش وزن و حجم سیستم کنترلی نیز وجود دارد.
مد کنترل برداری در بسیاری از کاربردهای صنعتی مورد استفاده قرار میگیرد، از جمله ماشینآلات صنعتی، رباتیک، خطوط تولید، موتورهای القایی بزرگ و دستگاههای متحرک مانند برقرسانها و آسانسورها.
این مد کنترلی برای کاربردهایی که نیاز به کنترل دقیق سرعت، گشتاور و جریان موتور دارند، بسیار مناسب است. با استفاده از مد کنترل برداری، عملکرد بهبود یافته موتورهای القایی در اتوماسیون صنعتی، صنایع برق و صنعت خودرو به دست میآید.
4. مد کنترل DTC (Direct Torque Control)
مد کنترل DTC (Direct Torque Control) یکی از مدهای پیشرفته کنترل در اینورترها است که برای کنترل دقیق و سریع گشتاور موتورهای القایی استفاده میشود. در این مد کنترلی، به جای کنترل سرعت و گشتاور موتور، مستقیماً بر روی کنترل گشتاور متمرکز میشود.
در مد DTC، میزان گشتاور مورد نظر توسط الگوریتمهای پیچیده محاسبه میشود و ولتاژ و فرکانس خروجی به گونهای تنظیم میشوند که گشتاور مطلوب حفظ شود. این مد کنترلی براساس اطلاعات بردار جریان و بردار ولتاژ موتور، تصمیمگیری سریع و دقیق را برای تنظیم گشتاور انجام میدهد.
مد کنترل DTC به عنوان یکی از مدهای پیشرفته کنترل، از ویژگیهای مهمی مانند پاسخگویی سریع به تغییرات بار، دقت بالا در کنترل گشتاور و سرعت و توانایی مدیریت دقیق جریان موتور برخوردار است.
همچنین، از طریق کاهش زمان پاسخگویی و بهبود کیفیت و عملکرد سیستم، موجب صرفهجویی در انرژی و افزایش کارایی سیستم میشود. مد کنترل DTC در کاربردهایی که نیاز به کنترل دقیق گشتاور و سرعت موتور دارند، مورد استفاده قرار میگیرد.
این مد کنترلی برای موتورهای القایی بزرگ، ماشینآلات صنعتی، خطوط تولید، صنایع برق و صنعت خودرو مناسب است. با استفاده از مد کنترل DTC، عملکرد بهبود یافته موتورهای القایی در اتوماسیون صنعتی، صنایع برق و صنعت خودرو به دست میآید. این مد کنترلی با قابلیت کنترل دقیق و پایدار گشتاور موتور، بهبود عملکرد سیستم کنترلی را بهبود میبخشد.

5. مد کنترل مستقیم (Direct Control)
مد کنترل مستقیم (Direct Control) یکی از مدهای کنترلی در اینورترها است که برای کنترل مستقیم بر روی ولتاژ و جریان موتور استفاده میشود. در این مد، به جای کنترل سرعت و گشتاور، مستقیماً بر روی ولتاژ و جریان موتور تنظیمات کنترلی اعمال میشود.
در مد کنترل مستقیم، از مدلسازی دقیق موتور و استفاده از روشهای کنترل مستقیم جریان و ولتاژ برای ایجاد ارتباط مستقیم با موتور استفاده میشود. با این روش، میتوان جریان و ولتاژ را به طور دقیق و پیشرفته کنترل کرده و عملکرد موتور را بهینه سازی کرد.
مزیت اصلی مد کنترل مستقیم، دقت و قدرت کنترل بالا در کنترل سرعت، گشتاور و جریان موتور است. این مد کنترلی به عنوان یکی از مدهای پیشرفته کنترل، امکان کاهش زمان پاسخگویی سیستم، کاهش نوسانات و افزایش کیفیت کنترل را فراهم میکند.
مد کنترل مستقیم در کاربردهایی که نیاز به کنترل دقیق بر روی ولتاژ و جریان موتور دارند، استفاده میشود. این مد کنترلی برای موتورهای القایی بزرگ، صنایع برق، صنعت خودرو و سیستمهای اتوماسیون صنعتی مناسب است.
با استفاده از مد کنترل مستقیم، عملکرد بهبود یافته موتورهای القایی در کنترل سرعت، گشتاور و جریان به دست میآید. این مد کنترلی با قابلیت کنترل دقیق و پایدار ولتاژ و جریان موتور، بهبود عملکرد سیستم کنترلی را فراهم میکند.
اهمیت انتخاب مد مناسب
انتخاب مد کنترلی مناسب برای یک اینورتر بسیار مهم است زیرا این مد تأثیر زیادی بر عملکرد، کارایی و پایداری سیستم دارد. به عنوان مثال، برای برنامههایی که نیاز به کنترل دقیق جریان و ولتاژ دارند، مد FOC میتواند انتخاب مناسبی باشد. از طرف دیگر، در برنامههایی که نیاز به سادگی و کارآیی بالا است، مد V/F ممکن است بهترین گزینه باشد.
نیازمندیهای کاربردی
علاوه بر انتخاب مد کنترلی، نیازمندیهای کاربردی همچنین نقش مهمی در تعیین نوع مد کنترلی دارند. برای مثال، در برخی از برنامهها ممکن است نیاز به کنترل دقیق سرعت و گشتاور موتور باشد، در حالی که در برنامههای دیگر، اولویت بیشتری برای کنترل ولتاژ و جریان خروجی وجود دارد.
این تنها چند نمونه از مدهای کنترلی در اینورترها هستند. در عمل، مدل و نوع مد کنترلی مورد استفاده در هر اینورتر بسته به نیازها و کاربردهای خاص آن مشخص میشود. همچنین، با پیشرفت تکنولوژی، مدهای کنترلی پیشرفتهتری نیز در دستگاههای الکترونیکی جدیدتر به کار گرفته میشوند.