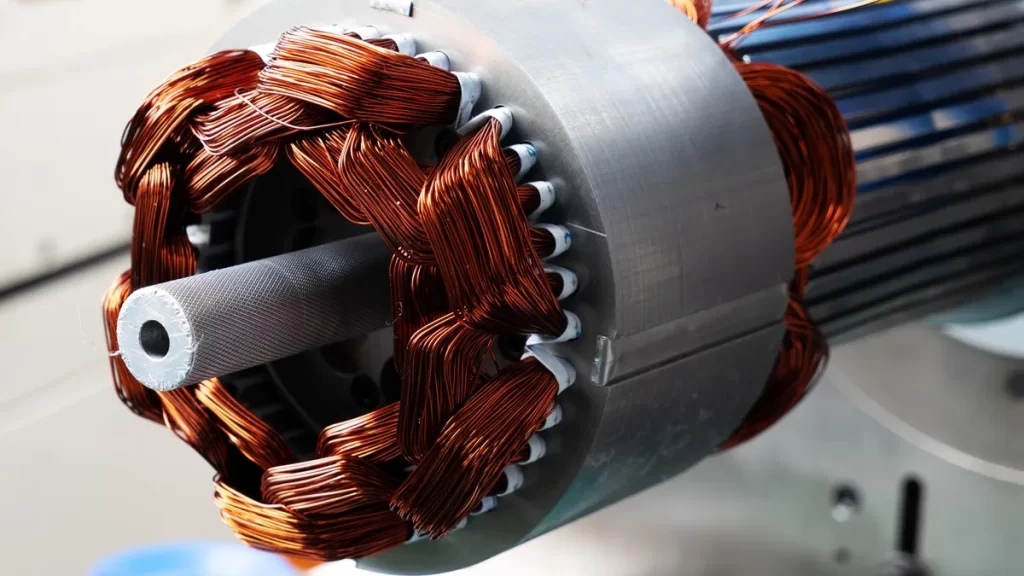
موتور DC بدون جاروبک (BLDC) یکی از مهمترین نوآوریها در عالم الکترونیک و خودروسازی می باشد. این موتورها به دلیل عملکرد برتر، کارایی بالا، و کاربردهای گسترده، به سرعت جایگزین موتورهای DC با جاروبک شدهاند. در این مقاله، به معرفی موتورهای BLDC، عملکرد آنها، کاربردها، و مزایا و معایب آنها پرداخته خواهد شد.
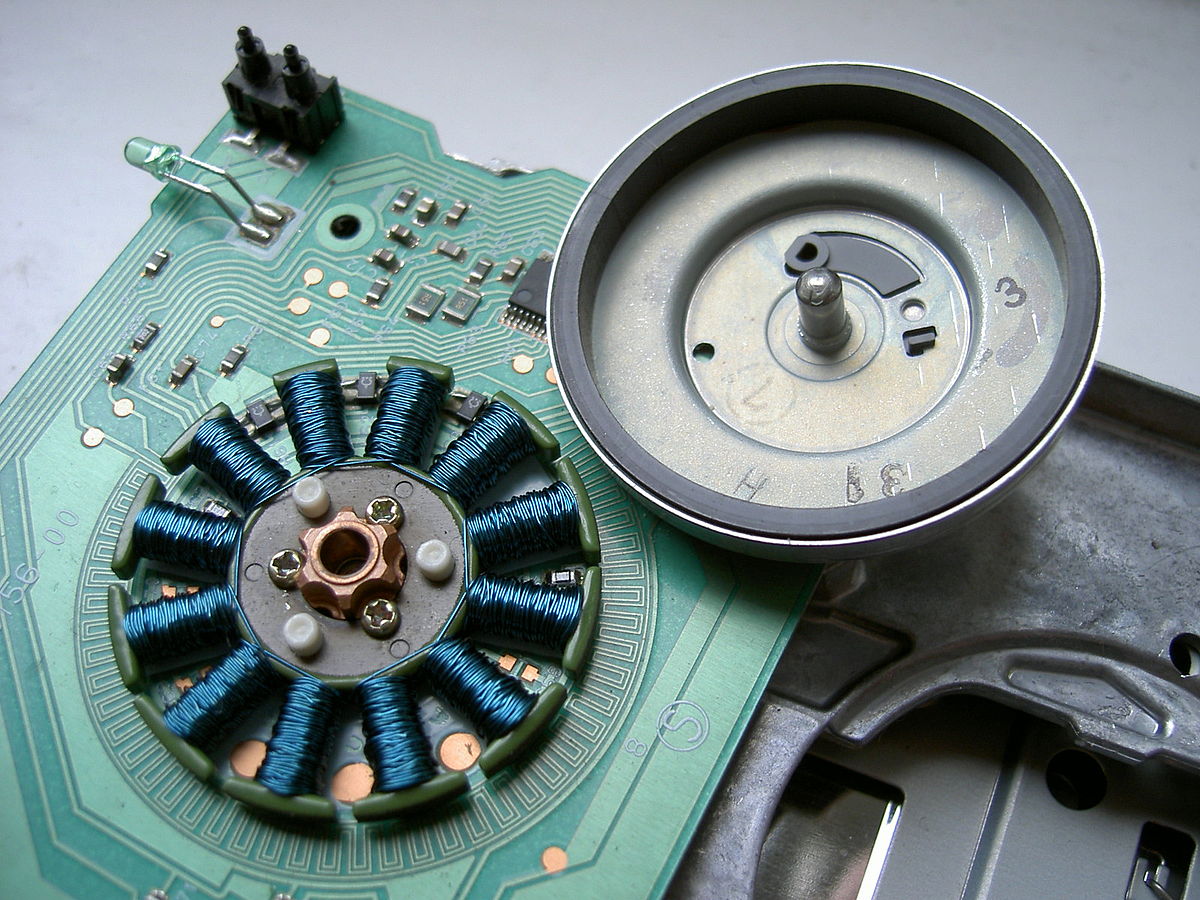
موتور DC بدون جاروبک (BLDC) عملکرد بدون جاروبک دارد، به این معنا که برای تولید حرکت و انرژی الکتریکی به فرشهای جاروبک نیاز ندارد. این مزیت موجب ماندگاری بیشتر و کاهش نگهداری میشود.
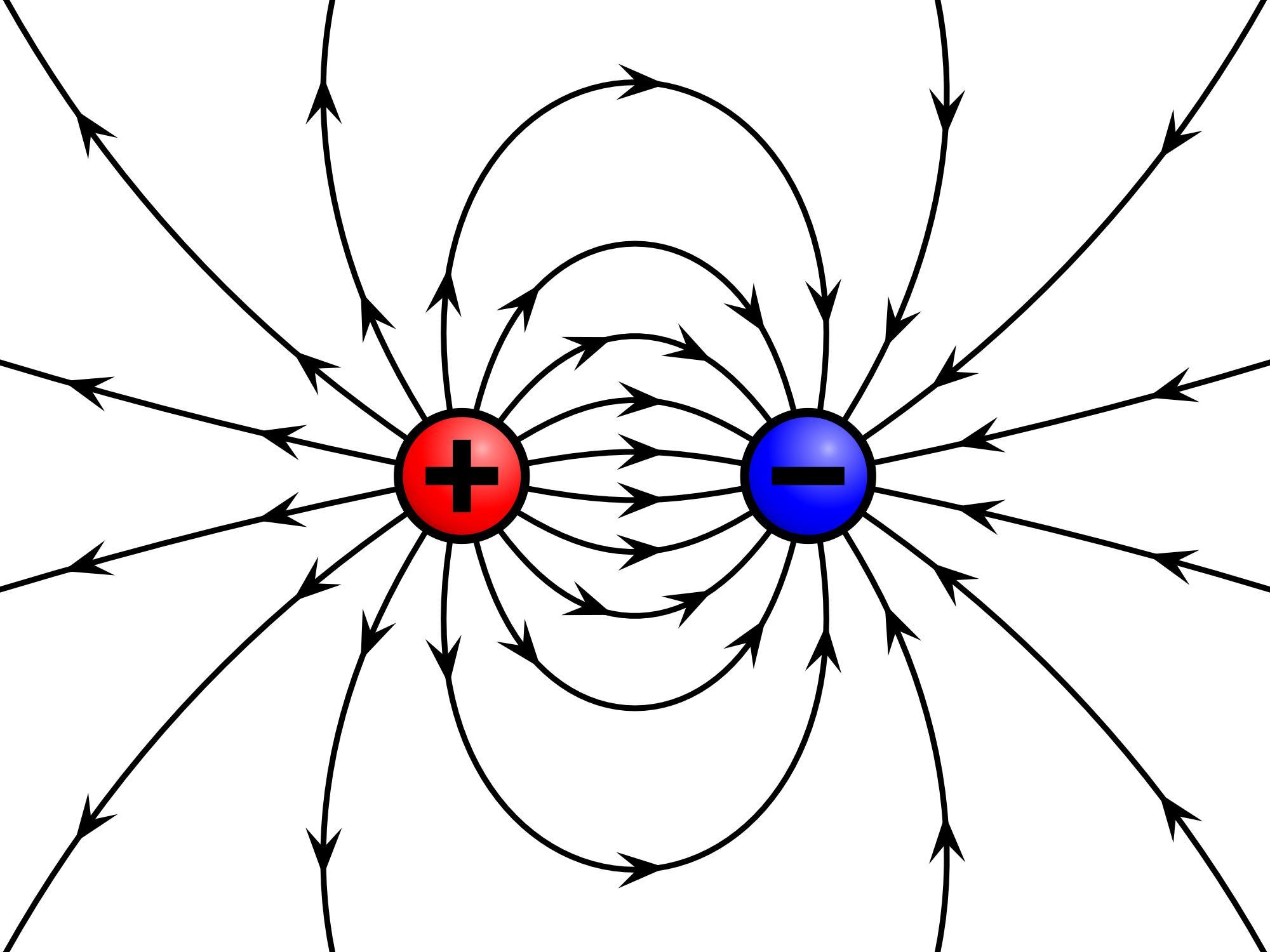
موتور DC بدون جاروبک (BLDC)، با تکنولوژی بدون جاروبک، به تبدیل انرژی الکتریکی به حرکت مکانیکی میپردازد. عملکرد آن بر مبنای چهارچوب الکترومغناطیسی و کنترل الکترونیکی پیچیده است که به این موتور امکاناتی چندگانه اعطا میکند:
موتور DC بدون جاروبک (BLDC) به دلیل ویژگیها و مزایایی که دارد، در محیطها و صنایع متنوعی کاربرد دارد: