موتورهای الکتریکی به عنوان یکی از دستگاههای اساسی در صنایع مختلف و خانهها بسیار اهمیت دارند. در جریان توسعه تکنولوژی، موتورها به صورت مداوم بهبود مییابند و انواع مختلفی از آنها وجود دارد.
یکی از انواع نوآورانه موتورهای الکتریکی، موتور رلوکتانسی است. این موتورها به عنوان یک جایگزین با عملکرد بالا و کاربردهای گسترده مورد توجه قرار گرفتهاند. در این مقاله، به بررسی اصول عمل، مزایا و کاربردهای موتور رلوکتانسی خواهیم پرداخت.

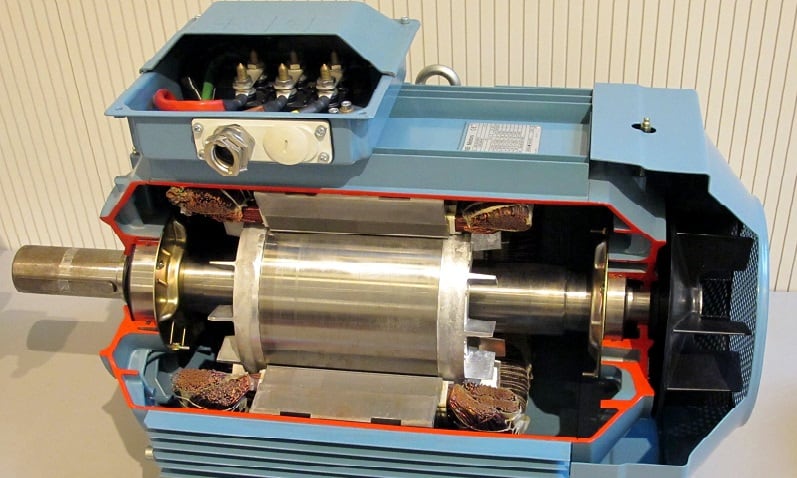
موتور رلوکتانسی بر اساس اصول عمل رلوکتانس مغناطیسی عمل میکند. این موتورها دارای قطبهای مغناطیسی متغیر هستند که میتوانند به صورت دینامیکی تغییر کنند. عمدتاً این موتورها به دو نوع تقسیم میشوند:

موتورهای رلوکتانسی علاوه بر مزایا، معایبی نیز دارند که در نظر گرفتن آنها در انتخاب و استفاده از این موتورها ضروری است. در زیر به برخی از معایب موتورهای رلوکتانسی اشاره شده است:
موتورهای رلوکتانسی به عنوان یک فناوری نوآورانه در عالم موتورهای الکتریکی، در انواع مختلف کاربردهایی دارند. این موتورها به دلیل مزایایی از قبیل بازدهی بالا، نویز و ارتعاش کمتر، و کنترل دقیق جریان و سرعت، به تنوعی از صنایع و کاربردها ارائه میشوند. در زیر به برخی از کاربردهای مهم موتورهای رلوکتانسی اشاره میشود.
همچنین، موتورهای رلوکتانسی در بسیاری از کاربردهای دیگر نیز مورد استفاده قرار میگیرند و با توجه به ویژگیهای منحصر به فرد خود، به بهبود عملکرد و کارایی دستگاهها و ماشینآلات کمک میکنند.
موتور رلوکتانسی به عنوان یک نوع نوآورانه از موتورهای الکتریکی با اصول عمل منحصر به فرد و مزایا وسیع در عملکرد و کاربردها، توجه صنعت و تکنولوژی را به خود جلب کرده است. با توجه به مزایای این موتورها از جمله بازدهی بالا و کاربردهای متنوع، انتظار میرود که استفاده از آنها در صنایع مختلف در آینده ادامه داشته باشد و به بهبود عملکرد دستگاهها و ماشینآلات کمک کند.