تفاوت های سروو موتور و استپر موتور و موتور DC در این مقاله در جهت انتخاب بهترین گزینه برای پروژههای شما بررسی می شود.
در دنیای پیشرفته فناوری و اتوماسیون، موتورها نقش بسیار مهمی در حرکت و کنترل اشیاء و دستگاههای مختلف ایفا میکنند. موتورها به عنوان محرکهای اصلی در دستگاههای الکترومکانیکی، رباتیک، صنعتی، پزشکی و بسیاری از کاربردهای دیگر به کار میروند. در این زمینه، سه نوع موتور اساسی به نامهای “موتورهای سروو”، “موتورهای استپر” و “موتورهای DC” برجسته هستند.

هر کدام از این موتورها ویژگیها، عملکرد و کاربردهای منحصر به فردی دارند که بر اساس نیازها و شرایط مختلف ممکن است بهینه باشند. در این مقاله، به تفاوتها، عملکرد، کنترل، و کاربردهای این سه نوع موتور میپردازیم تا به مهندسان، توسعهدهندگان و علاقمندان به دنیای الکترومکانیک و رباتیک کمک کنیم تا انتخاب صحیح برای پروژهها و برنامههای خود داشته باشند.
ما در این مقاله به تفصیل به تفاوتها و ویژگیهای هر نوع موتور پرداخته و نکات کلیدی را برای انتخاب مناسبترین نوع موتور بر اساس نیازهای مختلف بررسی میکنیم. همچنین، به بررسی کاربردهای متنوع این موتورها در صنایع مختلف و تکنولوژیهای پیشرفته میپردازیم.
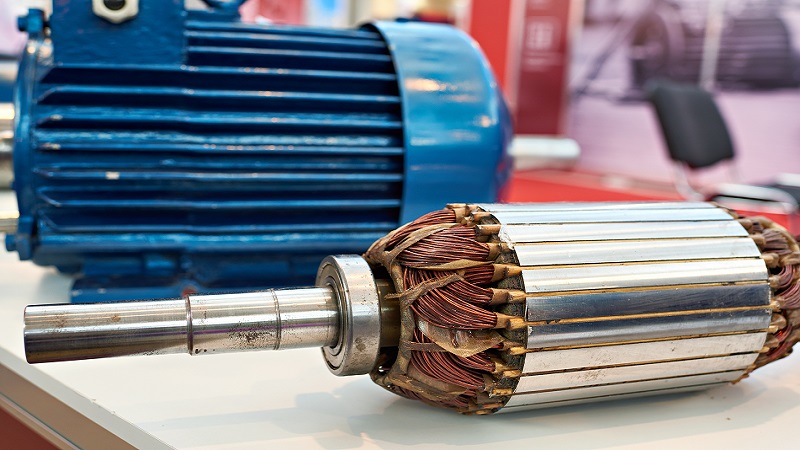
موتورهای DC یکی از نوعهای پرکاربرد موتورها در دنیای الکترومکانیک هستند. این موتورها از انرژی الکتریکی جریان مستقیم (DC) استفاده میکنند تا گشتاور و حرکت را ایجاد کنند. این موتورها به عنوان موتورهای عمومی و چند منظوره شناخته میشوند و در بسیاری از دستگاهها و برنامههای مختلف مورد استفاده قرار میگیرند.
یکی از ویژگیهای بارز موتورهای DC قابلیت کنترل سرعت و جهت حرکت آنها است. این موتورها با تغییر ولتاژ و جریان ورودی، سرعت و جهت حرکت را تنظیم میکنند. از این رو، آنها برای برنامههایی که نیاز به حرکت دایرهای با سرعت متغیر دارند، مناسب هستند.
موتورهای سروو دقت بالایی دارند و به وسیله بازخورد مکانیکی تنظیم و کنترل میشوند. این بازخورد معمولاً از انکودر یا تاچپد استفاده میکند تا موتور بتواند موقعیت دقیق را تشخیص دهد. یکی از مزایای این موتورها دقت بالایی در کنترل موقعیت است که به آنها اجازه میدهد خطاهای کوچک در موقعیت را تصحیح کنند.
برای کنترل دقیق موقعیت و زاویه، از سیگنال PWM (Pulse Width Modulation) استفاده میشود. این سیگنال به موتور میگوید که به کدام زاویه حرکت کند. موتورهای سروو به عنوان یک ابزار مناسب برای کاربردهایی با نیاز به دقت بالا مانند رباتیک، CNC ماشینآلات، دوربینهای تعقیب خودکار و سیستمهای جوشکاری پیچیده شناخته میشوند.

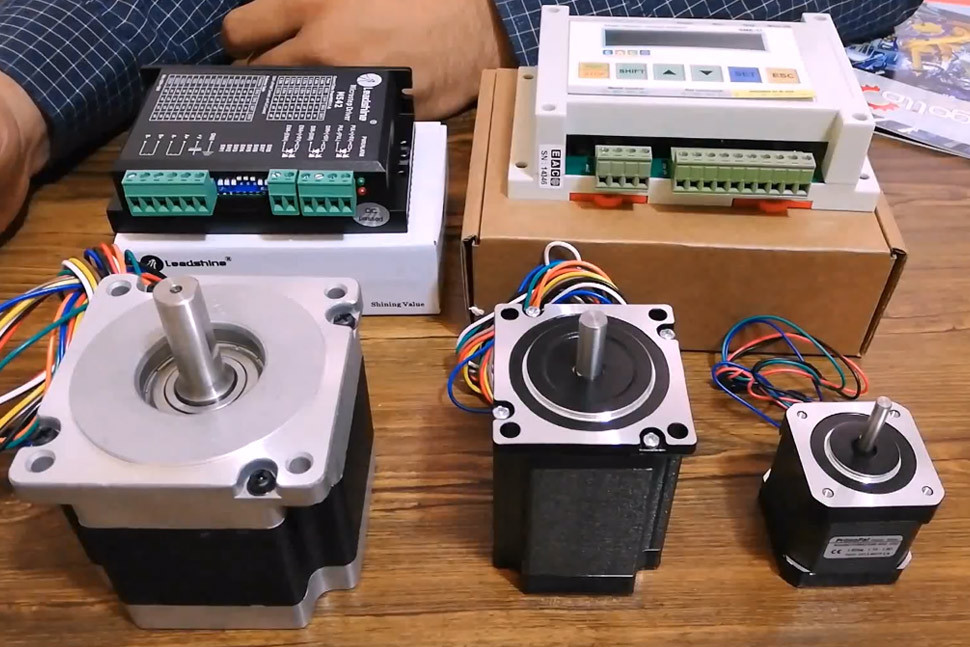
موتورهای استپر از پلههای دقیق برای حرکت استفاده میکنند. هر گام به تعداد مشخصی از پلهها حرکت میکند، و این به آنها امکان کنترل دقیق موقعیت و حرکت را میدهد. یکی از مزایای این موتورها این است که بدون نیاز به بازخورد مکانیکی میتوانند حرکت کنند.
برای کنترل موتورهای استپر، از سیگنالهای پالسی (pulse signals) استفاده میشود. این سیگنالها تعداد پلههایی که موتور باید حرکت کند را مشخص میکنند. به عبارت دیگر، این موتورها به تعداد پلهها به دلیل کمیت دقیق و تعریف شدهای که حرکت میکنند. موتورهای استپر برای دستگاههایی با نیاز به حرکت دقیق و مکانیکی مانند پرینترها، دستگاههای CNC، روباتها و دستگاههای پزشکی پیچیده مناسب هستند.